No products in the cart.

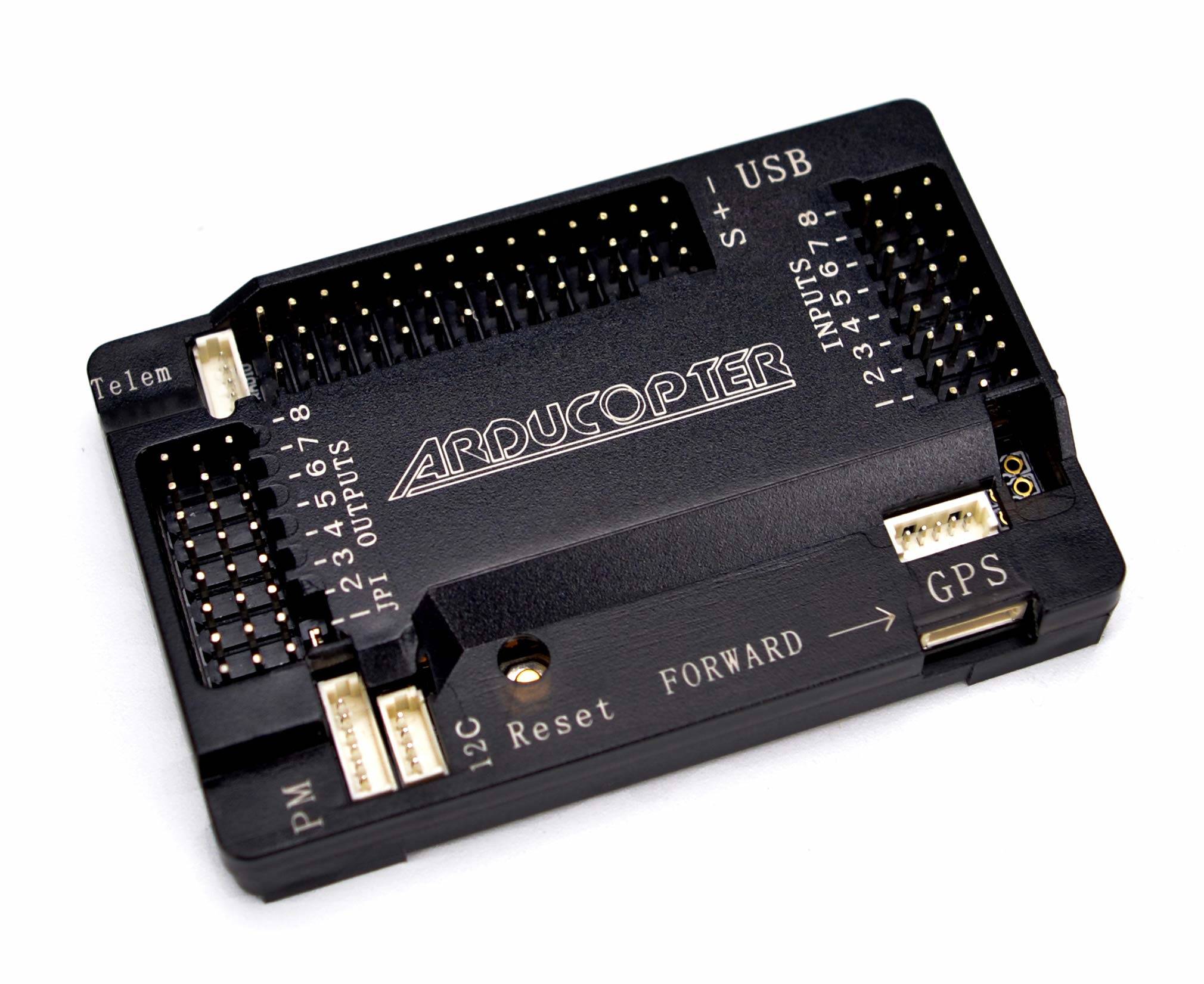



ArduPilot Mega 2.6 Board (Side Entry)
KSh5,000.00
Out of stock
Email when stock available
244 results found
- Afghanistan+93
- Åland Islands+358
- Albania+355
- Algeria+213
- American Samoa+1
- Andorra+376
- Angola+244
- Anguilla+1
- Antigua & Barbuda+1
- Argentina+54
- Armenia+374
- Aruba+297
- Ascension Island+247
- Australia+61
- Austria+43
- Azerbaijan+994
- Bahamas+1
- Bahrain+973
- Bangladesh+880
- Barbados+1
- Belarus+375
- Belgium+32
- Belize+501
- Benin+229
- Bermuda+1
- Bhutan+975
- Bolivia+591
- Bosnia & Herzegovina+387
- Botswana+267
- Brazil+55
- British Indian Ocean Territory+246
- British Virgin Islands+1
- Brunei+673
- Bulgaria+359
- Burkina Faso+226
- Burundi+257
- Cambodia+855
- Cameroon+237
- Canada+1
- Cape Verde+238
- Caribbean Netherlands+599
- Cayman Islands+1
- Central African Republic+236
- Chad+235
- Chile+56
- China+86
- Christmas Island+61
- Cocos (Keeling) Islands+61
- Colombia+57
- Comoros+269
- Congo - Brazzaville+242
- Congo - Kinshasa+243
- Cook Islands+682
- Costa Rica+506
- Côte d’Ivoire+225
- Croatia+385
- Cuba+53
- Curaçao+599
- Cyprus+357
- Czechia+420
- Denmark+45
- Djibouti+253
- Dominica+1
- Dominican Republic+1
- Ecuador+593
- Egypt+20
- El Salvador+503
- Equatorial Guinea+240
- Eritrea+291
- Estonia+372
- Eswatini+268
- Ethiopia+251
- Falkland Islands+500
- Faroe Islands+298
- Fiji+679
- Finland+358
- France+33
- French Guiana+594
- French Polynesia+689
- Gabon+241
- Gambia+220
- Georgia+995
- Germany+49
- Ghana+233
- Gibraltar+350
- Greece+30
- Greenland+299
- Grenada+1
- Guadeloupe+590
- Guam+1
- Guatemala+502
- Guernsey+44
- Guinea+224
- Guinea-Bissau+245
- Guyana+592
- Haiti+509
- Honduras+504
- Hong Kong SAR China+852
- Hungary+36
- Iceland+354
- India+91
- Indonesia+62
- Iran+98
- Iraq+964
- Ireland+353
- Isle of Man+44
- Israel+972
- Italy+39
- Jamaica+1
- Japan+81
- Jersey+44
- Jordan+962
- Kazakhstan+7
- Kenya+254
- Kiribati+686
- Kosovo+383
- Kuwait+965
- Kyrgyzstan+996
- Laos+856
- Latvia+371
- Lebanon+961
- Lesotho+266
- Liberia+231
- Libya+218
- Liechtenstein+423
- Lithuania+370
- Luxembourg+352
- Macao SAR China+853
- Madagascar+261
- Malawi+265
- Malaysia+60
- Maldives+960
- Mali+223
- Malta+356
- Marshall Islands+692
- Martinique+596
- Mauritania+222
- Mauritius+230
- Mayotte+262
- Mexico+52
- Micronesia+691
- Moldova+373
- Monaco+377
- Mongolia+976
- Montenegro+382
- Montserrat+1
- Morocco+212
- Mozambique+258
- Myanmar (Burma)+95
- Namibia+264
- Nauru+674
- Nepal+977
- Netherlands+31
- New Caledonia+687
- New Zealand+64
- Nicaragua+505
- Niger+227
- Nigeria+234
- Niue+683
- Norfolk Island+672
- North Korea+850
- North Macedonia+389
- Northern Mariana Islands+1
- Norway+47
- Oman+968
- Pakistan+92
- Palau+680
- Palestinian Territories+970
- Panama+507
- Papua New Guinea+675
- Paraguay+595
- Peru+51
- Philippines+63
- Poland+48
- Portugal+351
- Puerto Rico+1
- Qatar+974
- Réunion+262
- Romania+40
- Russia+7
- Rwanda+250
- Samoa+685
- San Marino+378
- São Tomé & Príncipe+239
- Saudi Arabia+966
- Senegal+221
- Serbia+381
- Seychelles+248
- Sierra Leone+232
- Singapore+65
- Sint Maarten+1
- Slovakia+421
- Slovenia+386
- Solomon Islands+677
- Somalia+252
- South Africa+27
- South Korea+82
- South Sudan+211
- Spain+34
- Sri Lanka+94
- St. Barthélemy+590
- St. Helena+290
- St. Kitts & Nevis+1
- St. Lucia+1
- St. Martin+590
- St. Pierre & Miquelon+508
- St. Vincent & Grenadines+1
- Sudan+249
- Suriname+597
- Svalbard & Jan Mayen+47
- Sweden+46
- Switzerland+41
- Syria+963
- Taiwan+886
- Tajikistan+992
- Tanzania+255
- Thailand+66
- Timor-Leste+670
- Togo+228
- Tokelau+690
- Tonga+676
- Trinidad & Tobago+1
- Tunisia+216
- Turkey+90
- Turkmenistan+993
- Turks & Caicos Islands+1
- Tuvalu+688
- U.S. Virgin Islands+1
- Uganda+256
- Ukraine+380
- United Arab Emirates+971
- United Kingdom+44
- United States+1
- Uruguay+598
- Uzbekistan+998
- Vanuatu+678
- Vatican City+39
- Venezuela+58
- Vietnam+84
- Wallis & Futuna+681
- Western Sahara+212
- Yemen+967
- Zambia+260
- Zimbabwe+263
Description
Description
The APM 2.6 is a complete open source autopilot system and the bestselling technology that won the prestigious 2012 Outback Challenge UAV competition. It allows the user to turn any fixed, rotary wing or multirotor vehicle (even cars and boats) into a fully autonomous vehicle; capable of performing programmed GPS missions with waypoints. Available with top or side connectors.
This revision of the board has no onboard compass, which is designed for vehicles (especially multicopters and rovers) where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference. (On fixed wing aircraft it’s often easier to mount APM far enough away from the motors and ESCs to avoid magnetic interference, so this is not as critical, but APM 2.6 gives more flexibility in that positioning and is a good choice for them, too). This is designed to be used with the 3DR uBlox GPS with Compass (see option below), so that the GPS/Compass unit can be mounted further from noise sources than APM itself.
APM 2.6 requires a GPS unit with an onboard compass for full autonomy.
ArduPilot Board
If you are using APM 2.6 with a GPS module that does not have a compass sensor, you can always use a 3V I2C external compass sensor.
Please note that the APM power module/GPS/Telemetry needs to be selected as options if you want to include them with your kit. If the options are not available it is because they are not in stock
Powerful Ground Control Software
Mission Planner
The downloadable mission planner software is what you use to configure and control your ardupilot board, features include:
Point-and-click waypoint entry, using Google Maps.
Select mission commands from drop-down menus
Download mission log files and analyze them
Configure APM settings for your airframe
Interface with a PC flight simulator to create a full hardware-in-the-loop UAV simulator.
See the output from APM’s serial terminal
What can the APM board control?
The ArduPilot Mega board can control Plans, Copters and Rovers. All you need to do is load the appropriate software onto the board with a few clicks
ArduPilot Mega Firmware
Difference between APM2.5+ and APM2.6
Both APM2.5 and APM2.6 are essentially the same board and both run the same software. The only difference is that APM2.6 does not have an onboard compass sensor which makes it more suitable for multicopters. APM 2.5+ includes an onboard compass sensor and can still be used for multicopters, but it better suited to fixed wing aircraft.
Features:
Arduino Compatible!
Can be ordered with top entry pins for attaching connectors vertically, or as side entry pins to slide your connectors in to either end horizontally
Includes 3-axis gyro, accelerometer and magnetometer, along with a high-performance barometer
Onboard 4 MegaByte Dataflash chip for automatic datalogging
Optional off-board GPS, uBlox LEA-6H module with Compass.
One of the first open source autopilot systems to use Invensense’s 6 DoF Accelerometer/Gyro MPU-6000.
Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
Atmel’s ATMEGA2560 and ATMEGA32U-2 chips for processing and usb functions respectively.
Resources
ArduPlane manual
ArduCopter manual
ArduRover manual
MPU-6000, Six-Axis (Gyro + Accelerometer) MEMS MotionTracking.
HMC5883L-TR, 3-Axis Digital Compass.
MS5611, MEAS High Resolution Altimeter.

Related products

Out of stock
Aeronautics & Robotics
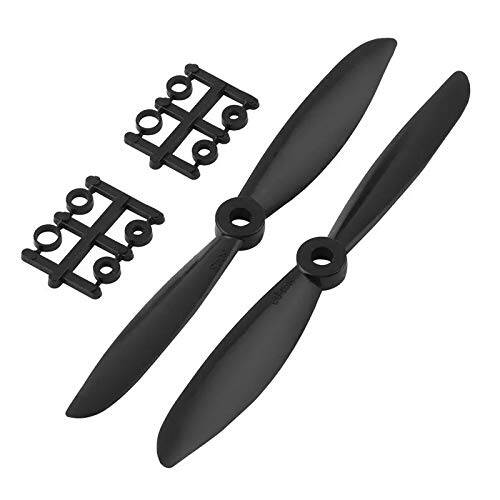
Propeller 6045 6×4.5 Black Propeller Props CW CCW For Quadcopter QAV250*
KSh300.00


Out of stock


Out of stock


Out of stock




Out of stock


Out of stock
